图神经网络和GCN
图神经网络
为什么使用图神经网络
传统神经网络(如CNN、RNN)难以直接处理非欧几里得结构数据(图结构数据)(如社交网络、分子结构)。现实世界中的许多数据都可以表示为图结构,如社交网络、生物网络、知识图谱、分子结构等,图神经网络能够直接对图结构数据进行建模,自动学习节点之间的复杂关系和依赖,捕捉数据中的全局和局部结构信息。

图神经网络的引入
对于一个图结构,其中包含了许多节点和边,我们认为每个节点并不是独立的,节点都会受到其他节点(比如相邻节点)的影响。
消息传递机制(Message Passing):每个节点通过聚合邻居的信息,并结合自身的特征,生成新的节点表示。这一过程模仿了现实中的信息传播(如社交网络中观点扩散、分子中原子的相互作用)。
消息传递的三个步骤:
消息生成(Message):邻居节点向目标节点发送信息。
聚合(Aggregation):目标节点将收到的所有邻居信息汇总。
更新(Update):目标节点结合聚合后的信息和自身特征,生成新表示。
以第\(k\)层GNN的节点\(v\)为例,其更新过程如下:
消息生成:
邻居节点\(u\in\mathcal{N}(v)\),向\(v\)发送消息: \[ \mathbf{m}_{u\rightarrow v}^{(k)} = \mathrm{Message}\left(\mathbf{h}_u^{(k-1)}, \mathbf{h}_v^{(k-1)}, e_{uv}\right) \]
- \(\mathbf{h}_u^{(k-1)}\):邻居节点\(u\)的上一层的特征向量
- \(e_{uv}\):边\(u\rightarrow v\)的特征(如权重、类型)
- \(\mathrm{Message}()\):消息函数,通常是一个可学习的神经网络(如MLP)或简单线性变换
聚合:
目标节点\(v\)将所有邻居消息汇总: \[ \mathbf{m}_v^{(k)} = \mathrm{Aggregate\left(\set{\mathbf{m}_{u\rightarrow v}^{(k)}\ | \ u\in\mathcal{N}(v)}\right)} \]
- \(\mathrm{Aggregate}()\):聚合函数,常见方式包括:
- 求和(Sum):捕捉邻居信息的累加效应(如分子中原子的总电荷)
- 均值(Mean):均衡各邻居贡献,防止度数高的节点主导
- 最大值(Max):关注最显著的特征(如社交网络中的关键意见领袖)
- 注意力加权(Attention):动态学习邻居重要性
- \(\mathrm{Aggregate}()\):聚合函数,常见方式包括:
更新:
结合聚合后的消息\(\mathbf{m}_v^{(k)}\)和节点自身特征\(\mathbf{h}_v^{(k-1)}\),生成新的特征: \[ \mathbf{h}_v^{(k)} = \mathrm{Update}\left(\mathbf{h}_v^{(k-1)}, \mathbf{m}_v^{(k)}\right) \]
- \(\mathrm{Update}()\):更新函数,常用门控机制(如GRU)或全连接层。
注意:图神经网络的一层指的是一层的邻居,而不是消息生成或者更新中可学习网络(如MLP)的层数,比如,对于当前的节点\(v\),第一层就是指\(v\)的邻居,第二层就是指\(v\)邻居的邻居(第一层聚合了节点的邻居,第二层中因为当前节点包含了邻居节点的信息,邻居节点也包含了其邻居节点的信息,因此可以看为聚合了邻居的邻居)。
图神经网络在多层堆叠后,容易出现过度平滑(Over-smoothing)的现象,即所有的特征趋于相似。为了解决这个问题,可以引入残差连接(Residual Connection)、跳跃连接(Jumping Knowledge)等。
图神经网络中,每个节点对应一个输出,因此可以将每个节点看做一个样本。每个节点的输出可以用于对节点的分类等任务。
GCN
引入
GCN,图卷积网络(Graph Convolution Network),是图神经网络中最简单的一种,原理就是聚合邻居的特征,通过非线性变换,得到自己的新特征(在GCN中并未考虑边的特征):
1 | |
上面的代码实现了GCN的模型,但是存在一个很大的问题,就是无法充分利用GPU资源进行训练,for循环会在每条边聚合一次信息,如果图比较大,那么运行就会非常慢。
下面引入可以在GPU上并行训练的GCN模型,包含公式、推导及实现。
GCN公式及推导
公式
\[ \mathbf{H}^{(k+1)} = \sigma(\tilde{\mathbf{D}}^{-\frac{1}{2}}\tilde{\mathbf{A}}\tilde{\mathbf{D}}^{-\frac{1}{2}}\mathbf{H}^{(k)}\mathbf{W}^{(k)}) \]
\[ \begin{aligned} &\tilde{\mathbf{D}} = \mathbf{D} + \mathbf{I} &\tilde{\mathbf{A}} = \mathbf{A} + \mathbf{I} \end{aligned} \]
其中,\(\mathbf{A}\in\mathbb{R}^{|V|\times|V|}\)是邻接矩阵,其中第\(i\)行第\(j\)列的元素\(a_{ij}\)表示的是节点\(i\)与节点\(j\)是否有边相连(\(a_{ij}=1\)代表有边相连,\(a_{ij}=0\)代表无边相连)。\(V\)是图中的所有节点的集合,\(|V|\)是所有节点的个数。\(\mathbf{D}\in\mathbb{R}^{|V|\times|V|}\)是度矩阵,是对角阵,其中第\(i\)行第\(i\)列的元素\(d_i\)表示的是第\(i\)个节点的度(相邻节点的个数)。\(\mathbf{I}\in\mathbb{R}^{|V|\times|V|}\)是单位阵。\(\mathbf{H}^{(k)}\)是各节点的在GCN第\(k\)层的嵌入向量,满足: \[ \begin{aligned} \mathbf{H}^{(k)} &= \left[\begin{matrix}\mathbf{h}_1^{(k)}&\cdots&\mathbf{h}_{|V|}^{(k)}\end{matrix}\right]^\top\\ &= \left[ \begin{matrix} {\mathbf{h}_1^{(k)}}^\top\\ {\mathbf{h}_2^{(k)}}^\top\\ \vdots\\ {\mathbf{h}_{|V|}^{(k)}}^\top \end{matrix} \right] \end{aligned} \] 其中\(\mathbf{h}_i^{(k)}\)表示的是第\(i\)个节点在GCN第\(k\)层的嵌入向量,此处为列向量。
推导
\[ \begin{aligned} \mathbf{H}^{(k)} &= \left[\begin{matrix}\mathbf{h}_1^{(k)}&\cdots&\mathbf{h}_{|V|}^{(k)}\end{matrix}\right]^\top\\ &= \left[ \begin{matrix} {\mathbf{h}_1^{(k)}}^\top\\ {\mathbf{h}_2^{(k)}}^\top\\ \vdots\\ {\mathbf{h}_{|V|}^{(k)}}^\top \end{matrix} \right] \end{aligned} \]
其中\(V\)是所有的节点的集合,\(|V|\)是所有节点的数量,\(\mathrm{h}_i^{(k)}\)是第\(k\)层第\(i\)节点的嵌入向量(为列向量),\(\mathrm{H}^{(k)}\)是所有节点嵌入向量构成的矩阵。
\(\mathbf{A}\)为邻接矩阵,其中第\(i\)行第\(j\)列\(a_{ij}\)为1代表节点\(i\)与节点\(j\)有边,\(a_{ij}=0\)代表节点\(i\)与节点\(j\)无边。邻接矩阵\(\mathbf{A}\)的第\(i\)行\(\mathbf{A}_i\)代表节点\(i\)与哪些节点是有边的。
考虑邻接矩阵的第\(i\)行: \[ \mathbf{A}_i = \left[\begin{matrix}a_{i1}&a_{i2}&\cdots&a_{i,|V|}\end{matrix}\right] \] 则 \[ \begin{aligned} \mathbf{A}_i\mathbf{H}^{(k)} &= \left[ \begin{matrix} a_{i1}&a_{i2}&\cdots&a_{i,|V|} \end{matrix} \right]\cdot\left[ \begin{matrix} {\mathbf{h}_1^{(k)}}^\top\\ {\mathbf{h}_2^{(k)}}^\top\\ \vdots\\ {\mathbf{h}_{|V|}^{(k)}}^\top \end{matrix} \right]\\ \\ &= a_{i1}{\mathbf{h}_1^{(k)}}^\top + a_{i2}{\mathbf{h}_2^{(k)}}^\top + \cdots + a_{i,|V|}{\mathbf{h}_{|V|}^{(k)}}^\top\\ \\ &= \sum_{j=1}^{|V|}a_{i,j}{\mathbf{h}_j^{(k)}}^\top \end{aligned} \] 其中,\(a_{i,j} = 1\)(节点\(i\)与节点\(j\)有边,相邻)或\(a_{i,j} = 0\)(节点\(i\)与节点\(j\)无边,不相邻)
即\(\mathbf{A}_i\mathbf{H}^{(k)}\)代表与\(i\)相邻的节点的嵌入矩阵的和。
考虑整个邻接矩阵: \[ \mathbf{A} = \left[ \begin{matrix} \mathbf{A}_1\\ \mathbf{A}_2\\ \vdots\\ \mathbf{A}_{|V|} \end{matrix} \right] \] 则 \[ \begin{aligned} \mathbf{A}\mathbf{H}^{(k)} &= \left[ \begin{matrix} \mathbf{A}_1\\ \mathbf{A}_2\\ \vdots\\ \mathbf{A}_{|V|} \end{matrix} \right]\cdot\mathbf{H}^{(k)}\\ \\ &= \left[ \begin{matrix} \mathbf{A}_1\mathbf{H}^{(k)}\\ \mathbf{A}_2\mathbf{H}^{(k)}\\ \vdots\\ \mathbf{A}_{|V|}\mathbf{H}^{(k)} \end{matrix} \right]\\ \\ &= \left[ \begin{matrix} \sum_{j=1}^{|V|}a_{1,j}{\mathbf{h}_j^{(k)}}^\top\\ \sum_{j=1}^{|V|}a_{2,j}{\mathbf{h}_j^{(k)}}^\top\\ \vdots\\ \sum_{j=1}^{|V|}a_{|V|,j}{\mathbf{h}_j^{(k)}}^\top \end{matrix} \right] \end{aligned} \] 如果直接对相邻节点的嵌入向量直接求和,那么很可能导致结果变得很大,为了解决这个问题,先引入度矩阵: \[ \mathbf{D} = \left[ \begin{matrix} d_1&0&0&\cdots&0\\ 0&d_2&0&\cdots&0\\ 0&0&d_3&\cdots&0\\ \vdots&\vdots&\vdots& &\vdots\\ 0&0&0&\cdots&d_{|V|} \end{matrix} \right] \] 其中\(d_i\)表示与节点\(i\)相连的节点的个数,度矩阵\(\mathbf{D}\)是一个对角阵。
令\(\mathbf{D}^{-1}\)为\(\mathbf{D}\)中每个元素求倒数,\(\mathbf{D}^{\frac{1}{2}}\)为\(\mathbf{D}\)中每个元素开根号,\(\mathbf{D}^{-\frac{1}{2}}\)为\(\mathbf{D}\)中每个元素开根号之后求倒数: \[ \mathbf{D}^{-1} = \left[ \begin{matrix} \frac{1}{d_1}&0&0&\cdots&0\\ 0&\frac{1}{d_2}&0&\cdots&0\\ 0&0&\frac{1}{d_3}&\cdots&0\\ \vdots&\vdots&\vdots& &\vdots\\ 0&0&0&\cdots&\frac{1}{d_{|V|}} \end{matrix} \right] \]
\[ \mathbf{D}^{\frac{1}{2}} = \left[ \begin{matrix} \sqrt{d_1}&0&0&\cdots&0\\ 0&\sqrt{d_2}&0&\cdots&0\\ 0&0&\sqrt{d_3}&\cdots&0\\ \vdots&\vdots&\vdots& &\vdots\\ 0&0&0&\cdots&\sqrt{d_{|V|}} \end{matrix} \right] \]
\[ \mathbf{D}^{-\frac{1}{2}} = \left[ \begin{matrix} \frac{1}{\sqrt{d_1}}&0&0&\cdots&0\\ 0&\frac{1}{\sqrt{d_2}}&0&\cdots&0\\ 0&0&\frac{1}{\sqrt{d_3}}&\cdots&0\\ \vdots&\vdots&\vdots& &\vdots\\ 0&0&0&\cdots&\frac{1}{\sqrt{d_{|V|}}} \end{matrix} \right] \]
则: \[ \begin{aligned} \mathbf{D}^{-1}\mathbf{A} &= \left[ \begin{matrix} \frac{1}{d_1}&0&0&\cdots&0\\ 0&\frac{1}{d_2}&0&\cdots&0\\ 0&0&\frac{1}{d_3}&\cdots&0\\ \vdots&\vdots&\vdots& &\vdots\\ 0&0&0&\cdots&\frac{1}{d_{|V|}} \end{matrix} \right]\cdot\left[ \begin{matrix} a_{11}&a_{12}&a_{13}&\cdots&a_{1,|V|}\\ a_{21}&a_{22}&a_{23}&\cdots&a_{2,|V|}\\ a_{31}&a_{32}&a_{33}&\cdots&a_{3,|V|}\\ \vdots&\vdots&\vdots&&\vdots\\ a_{|V|,1}&a_{|V|,2}&a_{|V|,3}&\cdots&a_{|V|,|V|} \end{matrix} \right]\\ &= \left[ \begin{matrix} \frac{a_{11}}{d_1}&\frac{a_{12}}{d_1}&\frac{a_{13}}{d_1}&\cdots&\frac{a_{1,|V|}}{d_1}\\ \frac{a_{21}}{d_2}&\frac{a_{22}}{d_2}&\frac{a_{23}}{d_2}&\cdots&\frac{a_{2,|V|}}{d_2}\\ \frac{a_{31}}{d_3}&\frac{a_{32}}{d_3}&\frac{a_{33}}{d_3}&\cdots&\frac{a_{3,|V|}}{d_3}\\ \vdots&\vdots&\vdots&&\vdots\\ \frac{a_{|V|,1}}{d_{|V|}}&\frac{a_{|V|,2}}{d_{|V|}}&\frac{a_{|V|,3}}{d_{|V|}}&\cdots&\frac{a_{|V|,|V|}}{d_{|V|}} \end{matrix} \right]\\ &= \left[ \begin{matrix} \frac{1}{d_1}\mathbf{A}_1\\ \frac{1}{d_2}\mathbf{A}_2\\ \vdots\\ \frac{1}{d_{|V|}}\mathbf{A}_{|V|} \end{matrix} \right] \end{aligned} \]
可以得到: \[ \begin{aligned} \mathbf{D}^{-1}\mathbf{A}\mathbf{H}^{(k)} &= \left[ \begin{matrix} \frac{1}{d_1}\mathbf{A}_1\mathbf{H}^{(k)}\\ \frac{1}{d_2}\mathbf{A}_2\mathbf{H}^{(k)}\\ \vdots\\ \frac{1}{d_{|V|}}\mathbf{A}_{|V|}\mathbf{H}^{(k)} \end{matrix} \right]\\ &= \left[ \begin{matrix} \frac{1}{d_1}\sum_{j=1}^{|V|}a_{1,j}{\mathbf{h}_j^{(k)}}^\top\\ \frac{1}{d_2}\sum_{j=1}^{|V|}a_{2,j}{\mathbf{h}_j^{(k)}}^\top\\ \vdots\\ \frac{1}{d_{|V|}}\sum_{j=1}^{|V|}a_{|V|,j}{\mathbf{h}_j^{(k)}}^\top \end{matrix} \right] \end{aligned} \]
这样,对于该矩阵的每行,就是对对应节点的相连的节点的嵌入向量求平均值。
但这样做,会将每个相连的节点都看做同等重要,在GCN中,认为该节点\(i\)的所有连接节点\(j\)中,邻居数量越少的\(j\)节点的信息越重要,比如对于下面的图:
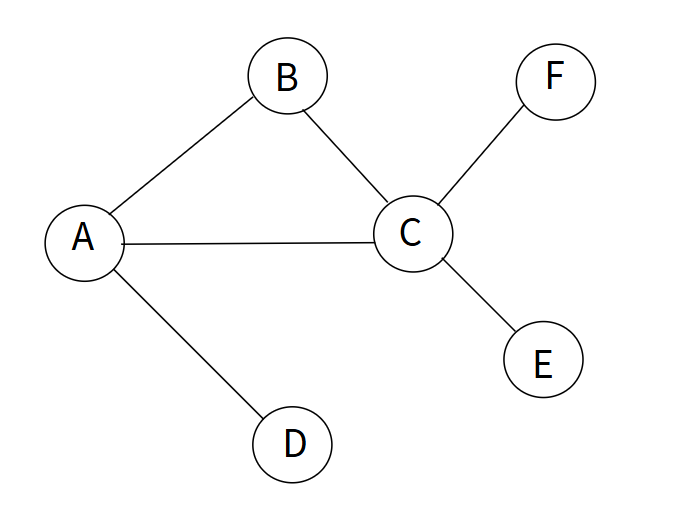
从两层GCN来看:

第二层:\(A\)的邻居节点有\(B\)、\(C\)、\(D\)
第一层:\(B\)的邻居节点有\(A\)、\(C\);\(C\)的邻居节点有\(A\)、\(B\)、\(E\)、\(F\);\(D\)的邻居节点有\(A\)
由于节点\(C\)与很多节点都相邻,那么其他很多节点都会考虑到\(C\)节点,节点\(C\)也会考虑到很多节点,也就是说,相邻节点数量多的节点,它的信息已经被很多节点在多层GCN传播的时候包含了,很多节点的信息在多层GCN传播的时候也已经被该节点包含了。而相邻节点数量少的节点,其包含其他节点的信息量则比较少,其他节点包含该节点的信息量也会比较少或者不包含该节点的信息。因此,从多层GCN的角度来看,如果仅仅只是对上一层的节点信息求平均,那么会包含更多的邻居数量多的节点的信息,包含更少的邻居数量少的节点的信息,GCN层数越多,这种情况会越明显,使得邻居数量少的节点信息占比越来越少。为了避免这个问题,在聚合相邻节点信息的时候,应该考虑到相邻节点的度(邻居个数),度越少的节点的信息越重要,因此我们可以对邻接矩阵\(\mathbf{A}\)的每列进行平均: \[ \begin{aligned} \mathbf{A}\mathbf{D}^{-1} &= \left[ \begin{matrix} a_{11}&a_{12}&a_{13}&\cdots&a_{1,|V|}\\ a_{21}&a_{22}&a_{23}&\cdots&a_{2,|V|}\\ a_{31}&a_{32}&a_{33}&\cdots&a_{3,|V|}\\ \vdots&\vdots&\vdots&&\vdots\\ a_{|V|,1}&a_{|V|,2}&a_{|V|,3}&\cdots&a_{|V|,|V|} \end{matrix} \right]\cdot\left[ \begin{matrix} \frac{1}{d_1}&0&0&\cdots&0\\ 0&\frac{1}{d_2}&0&\cdots&0\\ 0&0&\frac{1}{d_3}&\cdots&0\\ \vdots&\vdots&\vdots& &\vdots\\ 0&0&0&\cdots&\frac{1}{d_{|V|}} \end{matrix} \right] \\ &= \left[ \begin{matrix} \frac{a_{11}}{d_1}&\frac{a_{12}}{d_2}&\frac{a_{13}}{d_3}&\cdots&\frac{a_{1,|V|}}{d_{|V|}}\\ \frac{a_{21}}{d_1}&\frac{a_{22}}{d_2}&\frac{a_{23}}{d_3}&\cdots&\frac{a_{2,|V|}}{d_{|V|}}\\ \frac{a_{31}}{d_1}&\frac{a_{32}}{d_2}&\frac{a_{33}}{d_3}&\cdots&\frac{a_{3,|V|}}{d_{|V|}}\\ \vdots&\vdots&\vdots&&\vdots\\ \frac{a_{|V|,1}}{d_1}&\frac{a_{|V|,2}}{d_2}&\frac{a_{|V|<3}}{d_3}&\cdots&\frac{a_{|V|,|V|}}{d_{|V|}} \end{matrix} \right] \end{aligned} \] 则 \[ \mathbf{A}\mathbf{D}^{-1}\mathbf{H}^{(k)} = \left[ \begin{matrix} \sum_{j=1}^{|V|}\frac{1}{d_j}a_{1,j}{\mathbf{h}_j^{(k)}}^\top\\ \sum_{j=1}^{|V|}\frac{1}{d_j}a_{2,j}{\mathbf{h}_j^{(k)}}^\top\\ \vdots\\ \sum_{j=1}^{|V|}\frac{1}{d_j}a_{|V|,j}{\mathbf{h}_j^{(k)}}^\top \end{matrix} \right] \] 这样,邻居节点\(j\)的度越大,求和时其信息占比越小(权重为\(\frac{1}{d_j}\)),结合对所有信息的平均: \[ \mathbf{D}^{-1}\mathbf{A}\mathbf{D}^{-1}\mathbf{H}^{(k)} = \left[ \begin{matrix} \frac{1}{d_1}\sum_{j=1}^{|V|}\frac{1}{d_j}a_{1,j}{\mathbf{h}_j^{(k)}}^\top\\ \frac{1}{d_2}\sum_{j=1}^{|V|}\frac{1}{d_j}a_{2,j}{\mathbf{h}_j^{(k)}}^\top\\ \vdots\\ \frac{1}{d_{|V|}}\sum_{j=1}^{|V|}\frac{1}{d_j}a_{|V|,j}{\mathbf{h}_j^{(k)}}^\top \end{matrix} \right] \] 这样依旧有一个缺点:层数越多节点的数值越小,假设一个节点的嵌入向量的每个元素均满足标准正态分布\(\mathcal{N}(0,1)\),易知\(\mathbf{D}^{-1}\mathbf{A}\mathbf{H}^{(k)}\)中的每个元素也会满足标准正态分布\(\mathcal{N}(0,1)\),则\(\mathbf{D}^{-1}\mathbf{A}\mathbf{D}^{-1}\mathbf{H}^{(k)}\)中每个元素的均值为0,方差会比1更小,经过多层后,方差会越来越小,值会越来越接近于0。
如果既要考虑所求节点和其相邻节点的度,又要尽量保证聚合后各元素维持一个比较稳定的分布(均值和方差尽可能不变),就应该综合考虑: \[ \mathbf{D}^{-\frac{1}{2}}\mathbf{A}\mathbf{D}^{-\frac{1}{2}}\mathbf{H}^{(k)} = \left[ \begin{matrix} \frac{1}{\sqrt{d_1}}\sum_{j=1}^{|V|}\frac{1}{\sqrt{d_j}}a_{1,j}{\mathbf{h}_j^{(k)}}^\top\\ \frac{1}{\sqrt{d_2}}\sum_{j=1}^{|V|}\frac{1}{\sqrt{d_j}}a_{2,j}{\mathbf{h}_j^{(k)}}^\top\\ \vdots\\ \frac{1}{\sqrt{d_{|V|}}}\sum_{j=1}^{|V|}\frac{1}{\sqrt{d_j}}a_{|V|,j}{\mathbf{h}_j^{(k)}}^\top \end{matrix} \right] \] \(\mathbf{D}^{-\frac{1}{2}}\mathbf{A}\mathbf{D}^{-\frac{1}{2}}\mathbf{H}^{(k)}\)既考虑了对不同度的邻居节点的加权求和,又考虑了数值的稳定性。
上面的这个公式并没有考虑节点本身,而节点本身也是一个很重要的信息,因此,我们一般在图的节点上加入自环,使节点连接本身:
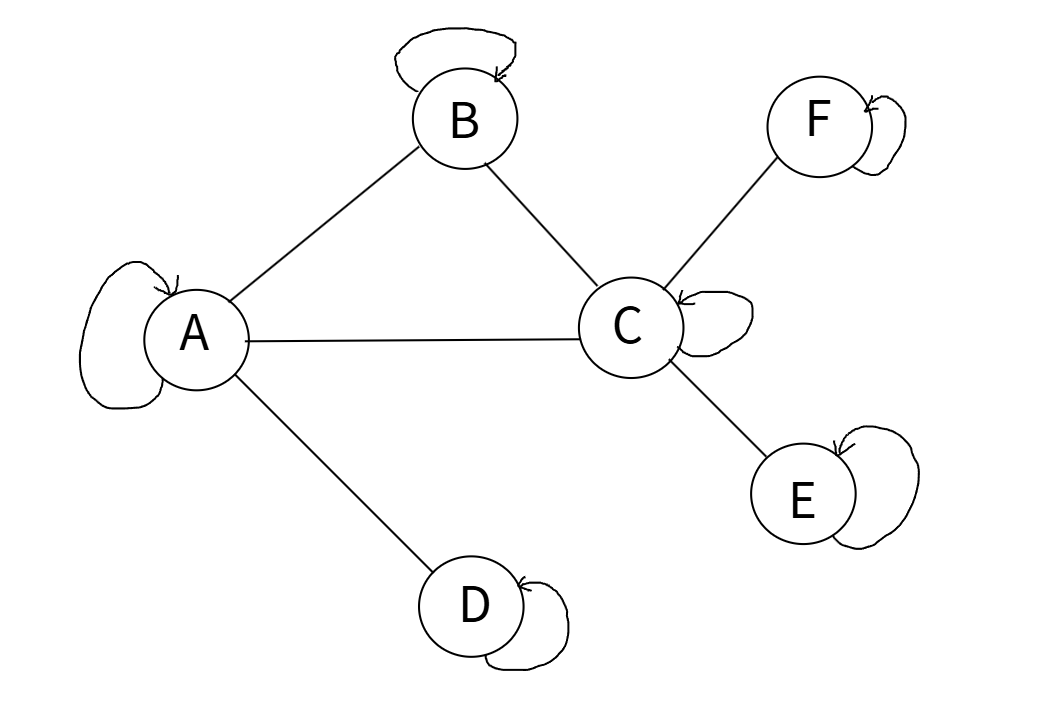
设单位矩阵\(\mathbf{I}\in\mathbb{R}^{|V|\times|V|}\),新的邻接矩阵\(\tilde{\mathbf{A}}\)为: \[ \tilde{\mathbf{A}} = \mathbf{A} + \mathbf{I} \] 即相比于原先的邻接矩阵,新的邻接矩阵的第\(i\)行第\(i\)列为1,表示自己与自己相连。
那么每个节点的度也需要加一,新的度矩阵\(\tilde{\mathbf{D}}\)为: \[ \tilde{\mathbf{D}} = \mathbf{D} + \mathbf{I} \] 则,新的公式为: \[ \tilde{\mathbf{D}}^{-\frac{1}{2}}\tilde{\mathbf{A}}\tilde{\mathbf{D}}^{-\frac{1}{2}}\mathbf{H}^{(k)} \] 即对包含自己节点和邻居节点进行加权求和,聚合信息。
信息聚合后,通过神经网络的线性层和激活函数,得到每个节点新的嵌入向量: \[ \mathbf{H}^{(k+1)} = \sigma(\tilde{\mathbf{D}}^{-\frac{1}{2}}\tilde{\mathbf{A}}\tilde{\mathbf{D}}^{-\frac{1}{2}}\mathbf{H}^{(k)}\mathbf{W}^{(k)}) \] 其中,\(\mathbf{H}^{(k)}\in\mathbb{R}^{|V|\times d^{(k)}}\),\(d^{(k)}\)为第\(k\)层各节点嵌入向量的维度;\(\mathbf{W}^{(k)}\in\mathbb{R}^{d^{(k)}\times d^{(k+1)}}\),\(d^{(k+1)}\)为第\(k+1\)层各节点嵌入向量的维度,则\(\mathbf{H}^{(k+1)}\in\mathbb{R}^{|V|\times d^{(k+1)}}\)
实现
一层GCN结构:
1 | |
其中,torch.spmm()是PyTorch中专门用于执行稀疏矩阵和密集矩阵的乘法的函数。
图的邻接矩阵\(\mathbf{A}\)往往是稀疏矩阵,因为大部分节点之间不存在连接。稀疏矩阵包含大量的零元素,若使用常规的矩阵乘法(如torch.mm())对稀疏矩阵进行操作,会浪费大量的计算资源和内存。torch.spmm()函数能高效处理稀疏矩阵和密集矩阵的乘法,它只会对非零元素进行计算,从而提高计算效率。
1 | |
mat1:这是一个稀疏矩阵,其类型为torch.sparse.FloatTensormat2:这是一个密集矩阵,其类型为torch.FloatTensor
返回值:返回一个密集矩阵,类型为torch.FloatTensor,形状为(mat1.size(0), mat2.size(1))
多层GCN的实现:
1 | |
注意:adj是\(\tilde{\mathbf{D}}^{-\frac{1}{2}}\tilde{\mathbf{A}}\tilde{\mathbf{D}}^{-\frac{1}{2}}\),可以在输入神经网络之前就处理好。